馬可夫覆蓋:主動推理過程的模型
馬可夫鏈和馬可夫覆蓋
自由能原理除了是解釋大腦功能的理論之外,也是在解釋除了生命體以外的人類社會組織或人工智慧系統等類生命現象時,非常有用的理論架構。若要討論生命現象,就必須先討論區分生與死的邊界(boundary)。只有活著的生命體才有內在和外在環境的區分,否則就不可能擁有所謂的生命現象。但是,生命體的邊界不是將內外完全隔絕開來,而是在區分內在和外在(環境)的同時,還必須能夠不斷接收與釋放能源和物質。邊界是生命現象的核心,從統計意義上區分內部和外部,其機率函數會隨著時間的過去具有「隨機最佳化」(probabilistic stochastic)屬性。邊界的存在讓我們無法從外部直接窺視內部,只能觀察到內在環境外圍的邊界而已。內在狀態與邊界可以透過貝氏推論維持恆定性(homoeostasis),進而達到自我生成(autopoiesis)。如何將這種有機體的「邊界」加以概念化和理論化,是自由能原理中非常重要的課題。弗里斯頓主張,可以將有機體的邊界化為「馬可夫覆蓋」(Markov blanket)的概念。生命體的邊界就是「馬可夫覆蓋」的意思,這是指內在狀態的運作是為了將自身邊界的自由能最小化。
馬可夫覆蓋是朱迪亞.珀爾(Judea Pearl)擴大「馬可夫鏈」(Markov chains)的概念進一步發展而來,因此我們先簡單了解一下何謂「馬卡夫鏈」。數學家安德烈.馬可夫(Andrey Markov)在討論單一事件影響其他事件的機率分布時,提出了「馬可夫鏈」的概念。當單一事件發生的機率受到之前事件的影響時,兩個事件就被定義為被馬可夫鏈連結在一起。假設我們連續不斷地擲硬幣,在第N次出現正面朝上的機率是一個獨立事件,完全不會受其之前或之後拋擲硬幣時硬幣是正面朝上還是背面朝上的影響。無論之前硬幣是哪一面朝上,每次拋擲硬幣時,正面朝上的機率永遠是1/2。
但是我們對於像拋擲硬幣這種完全不受之前發生任何事情影響的獨立事件之間的關係,卻一點也不在意。譬如我今天晚上吃什麼不會影響明天下雨的機率,因此兩個事件是獨立的,我們也不會特別在意這兩個事件之間的關係。當然,乍看之下毫不相干的事件之間,也可能有著千絲萬縷的關係。但是,這裡我們要注意的一點是,兩個就機率上來說互不相干的獨立事件,基本上我們不會放在一起考量。在日常生活或科學上,會讓我們對發生機率感到在意的事件,大多數都具有相互影響的關係。
譬如,在一個行政區中這次選舉是哪個黨的候選人當選,對下次選舉結果會有不小的影響。因此,兩個事件便被馬可夫鏈連結在一起。今天我會穿什麼顏色的衣服,很有可能也會受到昨天穿了什麼顏色衣服的影響。今天中午吃了什麼,大概也會影響到晚上菜單上的選擇。這些事件都算是被馬可夫鏈連在了一起。
特別用得到馬可夫鏈概念的領域,就是溝通(Communication)。一個音節或一個單字的意思會受到其之前或之後出現的音節或單字的明顯影響。譬如當一個人說:「ㄞ am a boy. ㄞ……」的時候,第二個出現的「ㄞ」,很有可能就是英文「I(我)」的意思。因為前面的句子是英文,所以後面的句子有很大的機率也是英文。相反地,「ㄞ是永不止息。ㄞ……」這句話中,第二個出現的「ㄞ」的意思,很有可能就是中文的「愛」。因為前面的句子是中文,所以後面跟著的句子也是中文的可能性很大。就像這樣,在對話中前面說了什麼話會對後面同音字的釋義(推測)有很大的影響。句子的含意會根據上下文(context)而有所不同,或者說話的意思會隨著情況而有所不同。由此可知,馬可夫鏈就是所有語用學(Pragmatics)現象的基礎。基於這些特點,馬可夫鏈早已成為人工智慧中自然語言處理(NLP)技術提供基本演算法的理論基礎。當人工智慧音箱理解並回應人類所說的自然語言時,其背後就有基於馬可夫鏈的演算法在運作。
馬可夫覆蓋是有關以馬可夫鏈連結在一起的事件網。珀爾在論及以圖形方式描述各事件(變數)間機率關係的圖模型時,對馬可夫覆蓋作了以下定義。假設幾個事件之間的發生機率複雜交織,形成相互影響的網絡,此時,在預測特定事件或節點(node)A的狀態時,所需的其他節點最小集合,即為該特定節點A的馬可夫覆蓋。換句話說,當相關節點狀態訊息給定之後,除了這些節點之外的其他節點狀態都不會因此受到任何影響,節點A的馬可夫覆蓋只會機率性地限制節點A的狀態。馬可夫覆蓋的英文名稱為什麼會用「Blanket」(毯子)一詞,是因為這種圖模型給人的感覺,就像用毯子把作為目標的特定節點A包裹起來保護的模樣。總而言之,馬可夫覆蓋是指作為邊界的節點,其用處是為了區分特定節點(內)與其他節點(外)。
假設我們將某個有機體的內部稱為節點X,這時,馬可夫覆蓋就是包圍著節點X的「邊界」。如果把會影響X的父母和受到X影響的子女,以及其他會影響他的子女的配偶節點全部集合在一起,就成了一張毯子。而這裡所說的父母和子女,是指在機率意義上牽涉到「影響」的關係。也就是說,產生影響的是父母,受到影響的是子女,而對特定子女共同產生影響的則是配偶。馬可夫覆蓋的意思,是當覆蓋節點的所有訊息都給定的情況下,即使額外給定外部其他節點Y的訊息,也不會添加在X節點上。
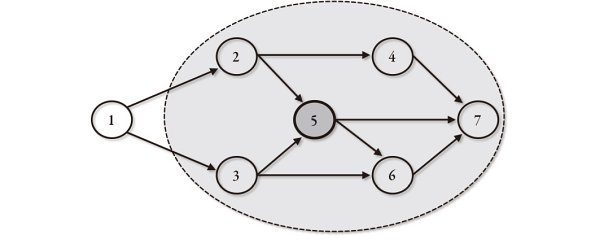
【圖5-6】圖中央以藍色圓圈標示的「5」是內部(節點X),2、3、4、6、7是圍繞節點5的邊界,也就是以5為內部的5的覆蓋。形成覆蓋的節點中,有對內部(5)產生影響的父母(2、3)和受到影響的子女(6、7),以及對子女共同產生影響的配偶(4)。在這個狀態中,2、3、4、6、7是5的覆蓋,只有這幾個節點的訊息全部給定的情況下,才能充分預測出5的狀態。即使額外給定覆蓋之外的外部節點1的訊息,也不會添加到5上。這張圖中灰色標示的部分是生命體,節點5是內部,節點1是環境,作為馬可夫覆蓋的節點2、3、4、6、7則是統計意義上的邊界。
從空間角度來看,馬可夫覆蓋是內部和外部的「邊界」,但從時間角度來看的話,則是基於過去預測未來的「現在」,這也表示預測未來所需要的過去經驗訊息就存在於當下。馬可夫覆蓋是一個從統計角度同時區分和連結內與外、我與他人、過去與現在的存在。
透過馬可夫覆蓋看生命體的四種狀態
根據自由能原理,生命體具有外在、內在、感覺、行為四種狀態(states)。(參照【圖5-7】)
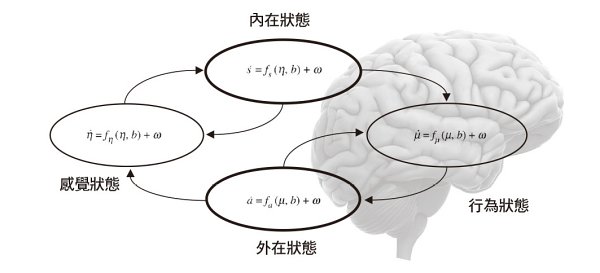
感覺狀態和行為狀態的運作方式非常相似,兩者都會產生預測誤差,同時也根據預測誤差更新狀態。例如,當某些視覺訊息傳入時,大腦會選擇最適合的過去訊息來解釋這些視覺訊息,並且推理出這些視覺訊息發生的原因。而在將推理結果套用在持續傳入的視覺訊息時,一定會出現差異,這些差異就是預測誤差。大腦為了減少預測誤差,會不斷更新和修正推理結果。
外界傳入的感覺訊息與內在模型所生成的預測,兩者之間的差異就是預測誤差。而以這些預測誤差為基礎來改變感覺訊息的方式,就是行為(譬如張大眼睛再看一次或上前靠近看)。而基於預測誤差來改變預測內容的主體,就是知覺。
大腦的推理系統會在預測誤差的基礎上,透過行為獲得新的感覺訊息,同時也改變對感覺訊息的預測來更新知覺內容。這種對「推理」和「預測誤差」的解釋可以說是一種隱喻,但這並不表示大腦在每次即時處理大量感覺訊息時,都是帶有「啊!我預測錯了,得趕緊修正」的具體意圖。實際上,感覺系統是由多層組成,「從感覺訊息自下而上」的預測誤差與「從生成模型自上而下」的預測誤差,會即時反饋到各個層級,這個過程本身是在我們的意識底層(無意識)自動完成的。換句話說,預測誤差的最小化過程,是在各層的神經系統上自動進行的,而存在於最高層級系統中的行動主體,就是「意識」。由此可知,大腦的基本任務就是根據來自視覺、聽覺、觸覺等感覺訊息不斷進行主動推理,將來自感覺器官的不明確聲音轉化為具體的知覺碎片(percepts)。
馬可夫覆蓋的行為狀態不僅可以影響環境,還可以減少內在狀態和馬可夫覆蓋本身的熵。行為可以維持「結構-功能」的完整,從行為會自動組織和再創行為的意義上來看,可以說是一個「自我生成」(Autopoiesis)的過程。內在狀態會根據貝氏推論,推理出引發感覺狀態的外在環境因素。因為大腦可以通過行為影響自己推理的對象,所以弗里斯頓才會將這個過程稱為「主動」(active)推理。
透過馬可夫覆蓋,我們可以更具體地觀察生命體的外在狀態、內在狀態、行為狀態、感覺狀態的相互作用方式,這對後文要討論的內在溝通的概念化有很大的幫助。
從【圖5-9】中我們可以具體地看到,「外在狀態」是指馬卡夫覆蓋以外的事物(X1、X2、X3、X11、X12、X13),也就是生命體置身的環境或世界。這裡所謂的外在狀態,不是指客觀的外在環境本身,而是指隨機投射在馬可夫覆蓋系統的感覺狀態或行為狀態的情況。所以不說是「外界」,而說是「外在狀態」。正如前面第四章所提到過的,我們所經驗的一切實體,都是知覺和認知作用的產物。馬可夫覆蓋的外在狀態,就是此種概念中的實體(objects of mind=dhamma=法)。
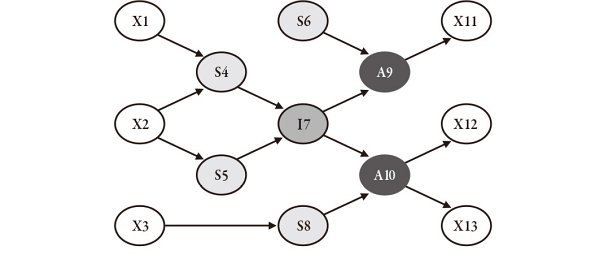
「內在狀態」是指在裡面的事物(I7),也可以說是存在於主動推理過程頂端的意識。
「行為狀態」是指受到內在狀態影響,再影響外在狀態的事物(A9、A10),例如帶動肌肉來產生動作。
「感覺狀態」分為兩種,一種是會影響內在狀態的事物(S4、S5),另一種是不經由內在狀態,直接影響行為狀態的事物(S6、S8)。會影響內在狀態的是直接上傳到意識的感覺或知覺;而不會影響內在狀態,而是直接影響行為狀態的感覺狀態,是在無意識中處理掉的感覺訊息。例如有一些內感受或本體感覺,雖然不會出現在意識中,但仍然對疼痛或情緒產生影響。再強調一次,這個模型中的「箭號」代表馬可夫鏈的意思;而所謂的「影響」,與其說是「決定性」的,不如說是「隨機性」的。
在大腦的內部(意識、判斷和預測的部分,I7)和外在環境之間,有一個充當馬可夫覆蓋角色的身體,專門負責感覺狀態(S4、S5、S6、S8)和行為狀態(A9、A10)。我們的大腦從感覺狀態中對有用的訊息進行抽樣,再根據內在模型主動推理,然後在此推理基礎上進行預測,使身體做出各種動作,以達成恆定性和動態平衡(allostasis)。
意識藉由整合「動作本身提供的」感覺訊息和「透過動作改變外在環境所得到的」感覺訊息,產生有關這個世界的單一圖像。這裡所謂「動作本身提供的訊息」,代表性的例子就是分布到關節、筋膜、肌肉上,並覺察四肢的動作或位置的本體感覺訊息,在【圖5-9】中,這可以用從A9或A10到S6或S4影響所及的箭號來表示。而所謂「透過動作改變外在環境所得到的感覺訊息」,是指我可以用眼睛看到自己的動作或用耳朵聽到自己動作時的聲音,或者當我用手做什麼動作時,我的手可以感覺到那個動作,這可以用從X11或X12指向S4的箭號來表示。對於這類訊息,意識(I7)會不斷地進行抽樣和再抽樣,並且基於主動推理調整預測,而最後就會產生出如第四章中所提到的單一性、同步性、連續性、體化性和被動性。
再看一次【圖5-9】中X1和S4的關係。X1是外在事物或環境提供的狀態訊息,S4是屬於身體一部分的感覺器官。但是,S4並非只是被動接受X1,S4也有一個可以在知覺過程中主動推理的神經系統。S4會根據自己的內在模型進行最適當的推理,朝著預測誤差最小化的方向產生與X1相關的知覺碎片。透過外在狀態X1與S4的交互作用,產生知覺碎片X1’後,再傳送到I7去。I7接收到的外在事物或環境,通常是由我們充當馬可夫覆蓋角色的身體賦予意義後產生的知覺碎片。11
另外,在I7通過S4接收知覺碎片X1’的過程中,也會進行主動推理,然後以知覺碎片X1’為基礎,改編成有意義的符號或敘事,將X1’又重新製作成X1’’。這就代表意識的本質就是故事敘述的意思。當意識I7以X1’為基礎產生X1’’時,就會考慮到A9或A10。在這裡,A9會對X1產生影響。假設X1是蘋果,想像當我們看到蘋果(X1)後,伸出手(A9)去摘蘋果的情景。這時,行為狀態(A9)的各種可能性必然會影響到意識(I7)將X1’(作為知覺碎片的蘋果)改編成X1’’(被賦予意義的蘋果,即故事)的過程,這就表示作用於特定對象的可能性會影響對該對象的知覺。弗朗西斯科.瓦瑞拉 (Francisco Varela)將其轉化為「引動認知」(enactive cognition)或「體化認知」(Embodied cognition)的概念。
I7透過S4認識X1的過程中,當大腦針對作為知覺對象的外在狀態推測身體可能做出的各種行為時,I7會利用A9強烈影響這個過程。也就是按照I7→A9→X1→S4→I7的順序,產生從意識出發再回到意識的「怪圈」(strange loop),這就是意識的基本特性,同時也是作為內在溝通基本型態的自我參照過程的運作方式。而稱其為「怪圈」的理由,是因為認識對象這件事,最後其實是認識自我。之所以能認識自我,是透過了對象,而我可能做出的行為又會同時反映在認識對象這件事情上。
意識從行為與知覺、對象與認知之間永無止息的漩渦中浮現。意識是主動推理的行動主體,同時也是主動推理的產物。雖然這樣的意識主要作用是編造故事和意圖,但並不會一一干預感覺狀態或行為狀態的馬可夫覆蓋所處理的所有訊息。譬如,我只會有「要舉起杯子喝咖啡」的想法(意圖),卻不會也無法感受到實現這個動作時所需要的一切行為狀態訊息和感覺狀態訊息,意識沒必要也不可能對舉起杯子時要用到的所有肌肉和神經一一下令。
大部分與「感覺-行為」相關的訊息都會由馬可夫覆蓋本身的主動推理系統來處理。個人的意識不可能知道自己身體感受到的所有感覺或行為上需要的所有訊息。只不過在這一切的漩渦中心,有一個像颱風眼一樣寧靜的存在,那就是「我」。這也是腦科學家魯道夫.里納斯(Rodolfo Llinás)所稱的「漩渦中的我」(I of the Vortex)之意。